








简单来讲,这款机器人是将活性材料整合到3D打印物体中,这里他们使用的活性物质是被称之为液晶弹性体的材料,这种材料在暴露于高温时会改变形状。
研究人员结合折纸工艺,在需要折叠的部分3D打印出两种不同类型的软铰链,这些铰链折叠的响应温度或速度不同,这样就可以通过编码来控制软体机器人的折叠顺序,以达到控制其运动形式的效果。
比如,他们利用这种工艺,制作出一个五角形轮,轮子可以在有温度的平板上完成自动折叠,并向前滚动的动作,并给他起名为Rollbot。
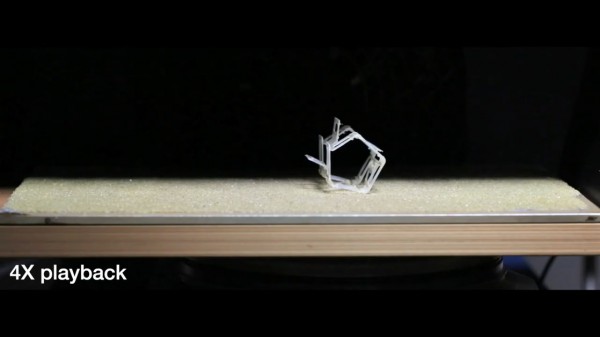
在没有变形前,它是一个大约8厘米长、4厘米宽的平板。当放置在热表面上时它首先会卷曲成五角形轮。
卷曲之后,嵌入在轮子五个面上的每个侧面上的铰链在与热表面接触时也会发生折叠,这样就会推着车轮转向下一侧。当该侧离开热表面时,铰链会恢复原状,为下一个循环做好准备。
此外,他们还设计了一款可以自动折叠的正方体。正方体顶部铰链的响应温度为100摄氏度,当温度升高至100摄氏度时,顶层的铰链率先向内折叠。
当温度继续升高至150摄氏度时,下层铰链达到响应温度,开始向内折叠。这便是哈佛大学所说的通过编程来控制软体机器人的运动。
还有一种类似于回形针的结构。当把材料放置在热环境中时,铰链可以通过先后折叠顺序,折叠成紧凑的回形针。当环境冷却时,回形针还可以展开。
“使用铰链可以更轻松地编程机器人功能并控制机器人如何改变形状。而不是让软机器人的整个身体以难以预测的方式变形,你只需要编程你的结构的一些小区域如何响应温度的变化,“和该论文的共同第一作者Connor McMahan如是说。
虽然目前这项研究只关注温度响应。但是据介绍这种液晶弹性体也可以编程以响应光、pH、湿度和其他外部刺激。
该论文的一位作者表示,这项工作证明了通过改变复合材料中的响应聚合物的组合可以导致材料对不同的刺激完成自驱动响应。将来,这些材料还可以被编程执行更复杂的任务,模糊材料和机器人之间的关系。





 robot.tv
robot.tv