




软体机器人由软材料加工而成,自身可连续变形,与刚性机器人相比具有更高的柔顺性、安全性和适应性,在人机交互、复杂易碎品抓持和狭小空间作业等方面具有不可比拟的优势。
北京航空航天大学王田苗教授团队在《机械工程学报》2017年13期发表了一篇题为《软体机器人:结构、驱动、传感与控制》的文章,该文作为封面文章综述了软体机器人的发展历程,将软体机器人归为传统绳索驱动/气动肌肉机器人、超弹性材料软体机器人和智能材料软体机器人三大类。该团队从仿生结构和仿生运动、驱动与加工、传感与控制三个方面对软体机器人的相关科学问题以及存在的技术难点进行总结与分析。他们还分析了软体机器人在仿生结构、抓持作业和医疗康复等领域潜在的应用价值,同时对软体机器人目前的发展现状和存在的关键科学难点进行了系统的总结,并得出刚柔耦合、可变刚度和驱动传感控制一体化等研究方向可能是未来软体机器人研究新的突破点。

北航的气动抓持器
几种软体机器人仿生结构

几种典型的仿生软体机器人
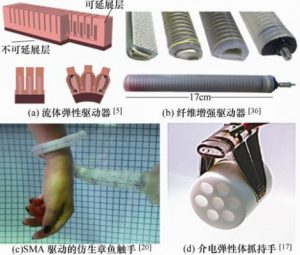
针对软体机器人的三大分支,软体机器人的驱动大致也可以分为三种:基于线缆变长度的欠驱动、基于流体的变压驱动和基于智能材料变形的驱动。
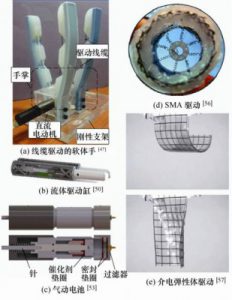
几种典型的驱动方式
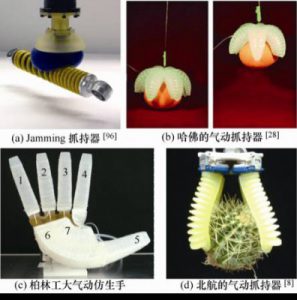
几种软体抓持器

软体机器人在医疗康复上的应用
总结与展望
软体机器人多采用软材料加工而成,相比刚性机器人,自由度高度冗余,运动更加灵活,且可根据周围的环境主动或者被动地改变自身的形态,极大弥补了刚性机器人的不足,将机器人的设计、建模、控制及应用推向了更高的平台。现有的软体机器人样机已经展示了其在移动、抓持、医疗和人机交互等领域的独特优势。软体机器人本体材料和软体生物组织相近,可以很好地模拟软体动物的运动模态,可以在未知的地形地貌下自如行走,可以承受巨大的冲击而不损坏,并且可以穿越复杂狭小的空间。这些特性突破了刚性机器人的极限,并且极大地简化了机器人的本体结构和控制系统的设计,为仿生移动机器人的研究提供了新的思路。软体机器人具有与生俱来的安全性,可以主动或被动适应物体的形态,在抓持不同形状的物体,尤其是软物体和易碎物体上具有绝对的优势,推进了人机共融技术的发展。比如,在工业生产线上软体机器人可以安全高效地与人协作完成分拣物体、装配等作业;在服务业软体机器人可以安全可靠地端茶递水,准备食物;在医疗康复领域可以在不给人体带来任何不适和伤害的前提下帮病人捶背按摩,辅助康复训练,检测人体生理信号。软体机器人虽然展现了出刚性机器人不具备的优势,但是软体机器人的发展也面临着诸多困难。如快速高效地将材料特性和结构结合设计出符合特定要求的机器人本体需要新的设计和仿真工具;加工复杂结构或者微型尺度的机器人需要新的加工方法;使机器人更加集成化、智能化需要新的驱动传感方案和控制理论支撑。
软体机器人因采用软材料制成从而能表现出很好的柔顺性,但是在某些应用下因负载低、刚度差、强度低等原因造成负面影响。如何在保证软体机器人变形能力的基础上提高软体机器人的强度是一个值得思考的科学问题。通过在硅胶材料里添加弹性纤维等材料或者利用jamming原理可以提高软体机器人的强度,但是这种方法不能带来量级上的变化。智能材料如SMA、SMP和磁流变液等在外界条件刺激下可以改变材料的相位或者流体的粘度,从而改变材料的刚度,并且材料的刚度可以通过和其他材料混合进行调节。将智能材料和软材料相结合的刚柔耦合机器人,不但可以保证软体机器人的柔顺性,在特殊需求下还可以将机器人的刚度提高数个量级,从而使机器人的负载等作业能力得以提升。如何实现软体机器人的刚柔耦合、可变刚度将是一个很好的研究方向。
软体机器人多采用智能材料和智能结构,通过机械预编程可以完成一定的动作,实现了驱动本体一体化。随着嵌入式柔性传感器和柔性电子技术的不断发展,软体机器人的驱动传感控制一体化成为可能。将传感器集成到软体机器人本体中,可使机器人感知更多的外界信息,实现智能化控制。如软体手在抓握物体时可以感知物体的形状,在灾难救援中可以感知生命体信息,在野外作业中可以感知障碍物和目标物等信息。但是实现软体机器人的传感驱动一体化仍面临着很多科学问题:如何把传感器嵌入到机器人本体?如何在不影响机器人本体的力学特性的同时提高传感器的精度、响应频率等?如何根据软体机器人的运动特点设计算法实现机器人的智能化控制?这些都是值得深入探索并亟待解决的问题。

主要作者简介
王田苗,男,1960 年出生,博士,教授,博士研究生导师,国家杰出青年基金获得者,教育部长江学者特聘教授。主要研究方向为工业机器人与嵌入式控制技术、仿生机器鱼推进机理、医疗外科机器人。发表论文70余篇,发明专利10余项,著作3部。
郝雨飞,男,1990年出生,博士研究生。主要研究方向为软体机器人、仿生机器人。
杨兴帮,男,1987年出生,博士。主要研究方向为微小型机器人,软体机器人,仿生两栖多模式运动。
文力,男,1983年出生,副教授,博士研究生导师。主要研究方向为软体机器人、仿生机器人。发表论文40余篇。
 robot.tv
robot.tv